 Yeni enerji verimliliği yüksek motor teknolojileri senkron tasarımını kullanırlar. Bu yazıda senkron ve asenkron motorlar arasındaki farklara ışık tutuyoruz.
Yeni enerji verimliliği yüksek motor teknolojileri senkron tasarımını kullanırlar. Bu yazıda senkron ve asenkron motorlar arasındaki farklara ışık tutuyoruz.
Enerji verimliliğinin önemi arttıkça elektrik motor üreticileri motor performansını arttırmak üzere çalışmalarını yoğunlaştırdılar. Ancak motor teknolojileri ile ilgili terminoloji biraz kafa karıştırıcı olabilir. Bu kısmen farklı terminolojilerin aynı basit motor konfigürasyonu için birbirinin yerine kullanılmasından kaynaklanır. Bunun en klasik örneği endüskiyon motorları ve asenkron motorlardır. Tüm endüksiyon motorları asenkron motorlardır. Endüksiyon motorların asenkron tarafı, stator alanı ile daha düşük alan rotor dönüş hızı arasındaki kaymadan kaynaklanır. Bu kaymanın nasıl oluştuğunun daha detaylı anlatımı motor iç detaylarına girer.
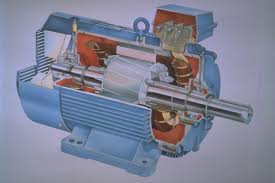
Asenkron Motor
Bugün pekçok endüksiyon motoru sincap kafes içinde bir döner parça içerir (rotor). Silindirik sincap kafes, oluklara yerleştirilmiş iletken ağır bakır, alüminyum ya da prinç parmaklıklardan oluşur. Bu parmaklıklar uçlarından iletken bir kasnağa tutturularak elektrik kısa devre yapılır. Rotor ise çelik laminasyonlardan oluşur ve statora göre daha az sayıda yiv içerir. Rotor yivlerinin sayısı, stator yivlerinin sayısına göre, birbirine entegre olmayacak şekilde ayarlanmalıdır ki motor çalışmaya başladığında rotor ve stator arasında manyetik kilitlenme önlenebilsin.
Sincap kafes yerine rotoru sargılı olan endüksiyon motorları da vardır. Bu sargılı rotor konfigürasyonunun temel mantığı, motor dönmeye başladıktan sonra rotor akımını düşürebilmeye imkan vermektir. Bunun için genellikle her bir rotor sarımı seri olarak bir dirençle bağlanır. Sarımlar, akımı bir çeşit kayar kasnak düzeneğinden alır. Rotor son hızına ulaşınca, kutupları yer değiştirir ve elektrik açıdan kafesli motorla aynı duruma gelir.
Motor sarımlarının sabit kısmına armatür ya da sator ismi verilir. Stattör sarımları alternatif akım kaynağına bağlanır. Statora voltaj uygulandığında, stator sarımlarından akım geçer ve bu akım bir manyetik alan yaratır. Rotor bu manyetik akımdan etkilenir ve rotor üzerinde voltaj ve akım yaratır.
Statordaki kuzey kutbu, rotordaki güney kutbunu endükler. Alternatif akım genliği ve polaritesi değiştikçe stator kutupları değişir. Endüklenen kutup, dönen stator kutbunu takip etmeye çalışır. Ancak, Faraday kanunu, elektromotif kuvvetin bir sargının düşük güçteki manyetik alandan yüksek güçteki manyetik alana geçmeri ile oluştuğunu söyler. Bunun tersi de geçerlidir. Eğer rotor tam olarak hareketli stator kutuplarını takip etseydi, manyetik alan gücünde bir değişiklik olmazdı. Dolayısıyla rotor, stator alanı değişiminin hep gerisinde kalır. Rotor alanı, bir miktar stator alnının gerisinde kaldıkça rotor, statordan daha düşük bir hızda döner. İkisinin arasındaki fark “kayma” olarak ifade edilir.
Kayma miktarı, motora bağlı yüke göre değişebilir, ama rotor devresinin rezistansına ve statorun manyetik akısının endüklediği alanın gücüne de bağlıdır .
Bir kaç basit denklem bu basit ilişkiyi daha da net hale getirebilir. Statora alternatif akım yeni uygulandığında, rotor sabittir. Rotora endüklenen voltajın frekansı, statordakinin frekansı ile aynıdır. Rotor dönmeye başlayınca, endüklenen voltajın frekansı fr düşer. Stator voltaj frekansına f dersek, ikisinin arasındaki ilişki, fr=sf olarak ifade edilebilir. Burada s kaymayı temsil eden ondalıklı sayıdır.
Rotor sabitken, rotor ve stator bir transformatör oluşturur. Rotora endüklenen voltaj E, bu transformatör denklemi ile aşağıdaki gibi ilgilidir:
E = 4.44 f N фm
Burada
N = bir stator kutbu içinde iletkenlerin sayısıdır (sincap kafes motorda tipik olarak küçüktür);
фm = maksimum manyetik akıdır ve Weber cinsinden ifade edilir.
Buna göre rotor döndüğünde oluşan voltaj Er kaymaya bağlı olarak:
Er = 4.44 s f N фm = s E
Olarak ifade edilir.
Bir sonraki makalede Senkron Motorlar
Ref: Leland E. Teschler
Adaptasyon: http://machinedesign.com/article/the-difference-between-asynchronous-and-synchronous-motors-0103